








Aus Platzgründen muss ich mich leider von einigen Teilen trennen. Größtenteils aus meinem Bestand der Flugsimulation.
Ein paar Teile sind schon bei Kleinanzeigen eingestellt aber es kommen noch einige diese Woche dazu.
Eine kleine Übersicht:
B737 MCP – weiße Anzeigen – beleuchtbar
B737 EFIS Panel
Logitech Saitek Pro Flight Yoke im 737 Style mit Zusatzschalter
B737 Nose wheel mit Schalter
B737 Autobrakes
B737 Landing gear
B737 Flaps gauge
B737 Brakes pressure
B737 Yaw damper
…..
Jede Menge Platinen aus meinem FSBUS-System.
Außerdem kommt noch das komplette selbstgebaute Cockpit mit 2 x 32 Zoll Monitore und 2 x Monitore für die Anzeigen dazu.
Auch hab ich noch ein paar Tachos die ich ja bereits hier gezeigt habe. Mazda RX8 sowie BMW und Golftachos.
Also einfach mal täglich in meine Kleinanzeigenliste reinschauen…..
https://www.ebay-kleinanzeigen.de/s-bestandsliste.html?userId=28222553

Für mein neues Projekt, die A-10C II, brauche ich neue Kontrollerkarten. Nach einigen Recherchen fiel meine Wahl auf Arduino Nano die mit einem Mega und dem RS485 den kleinsten Verkabelungsaufwand ausmachen. Hier die Infos aus dem DCS-Forum.
Über einem Arduino Mega, der mit USB am PC angeschlossen ist, werden alle Nanos direkt mit RJ45 verkabelt.
Also hab rasch die Platine für den Master und den Client mit Sprint-Layout 6.0 geplant und bei den Chinesen erstellen lassen.
5 Master (Mindestabnahme) und 30 Clients haben mit Versand, bei erstaunlich guter Qualität, keine 30€ gekostet)










| 7-Segmentanzeigen in weiß, mit und 1 bzw. 2fach Filter | |
  |
  |
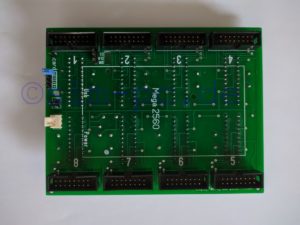
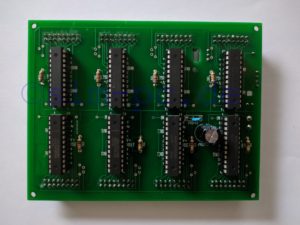
Display-Set by sim-pc.de V.1.03 (für einzelne 7Segemntanzeigen)

Weil mein alter Flugsimulator mit FSBUS läuft und dieser ja leider nicht weiterentwickelt wird, war ich auf der Suche nach Ersatz und da ich meine fertigen Panels weiter benutzen wollte, musste eine Lösung her mit der ich ohne viel Aufwand meine Karten weiter benutzen kann.
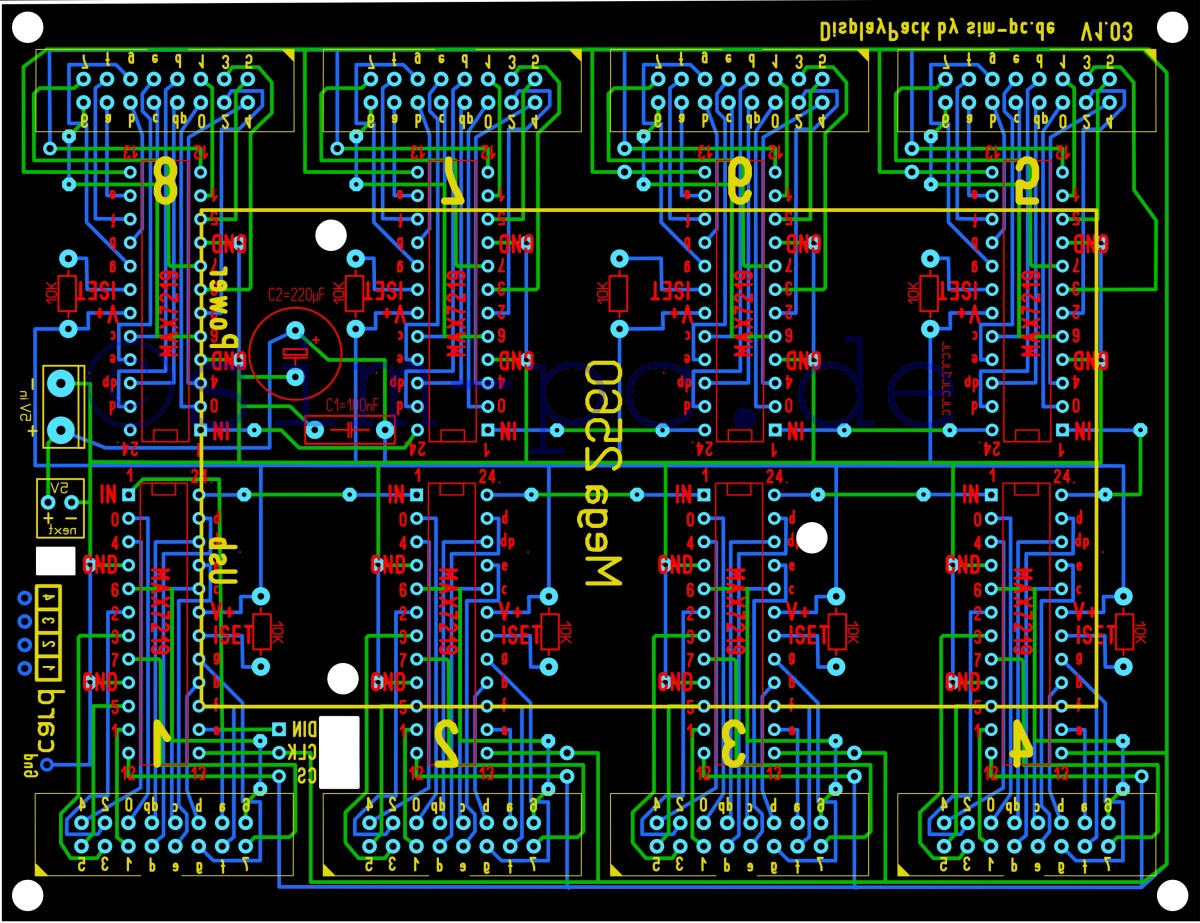
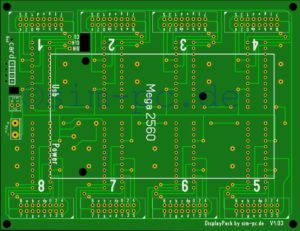
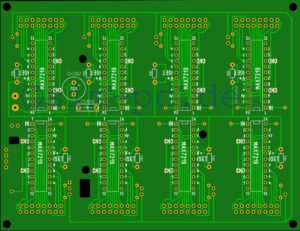
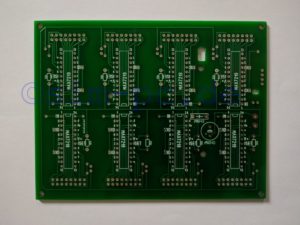
Ich hab mich jetzt für das Mobiflightsystem entschieden welches für die 7Segmentanzeigen den MAX7219-Chip nimmt.
Die Karte kann selbstverständlich auch mit Anderen Systemen genutzt werden die 7Segmentanzeigen oder LED’s benutzen
Damit ich meine alten Anzeigen weiterhin benutzen kann, habe ich das Design der Platinen bewusst so aufgebaut das ich alle meine Kabel direkt weiter benutzen kann.
Displaycard by sim-pc.de V.1.03 (einzelne 7Segemntanzeigen)

Da doch einige Leut’s Probleme mit dem Arduino bzw. mit dem flashen des selbigen haben, hier mal ein „Lehrvideo“ vom Download bis zur ersten Nadelbewegung….. weitere Videos folgen